- 03/14
- 2007
-
QQ扫一扫

-
Vision小助手
(CMVU)
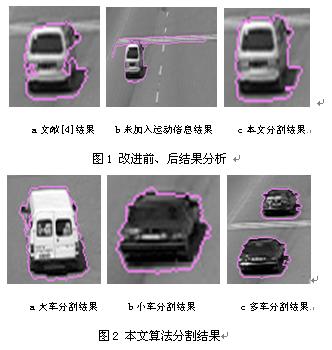
摘 要: 运动车辆检测是智能交通系统的一个重要组成部分。当运动目标的灰度分布均匀时, 利用帧差法所提取的运动目标容易产生空洞,某些部位无法完全恢复。本文根据像素可信度的基本原理,提出了一种新的基于快速水平集的运动目标检测方法。首先,利用两帧差法获得运动信息,然后,在运动信息条件的约束下,结合像素可信度改进水平集的速度函数来演化活动轮廓模型,最终提取出完整的运动目标轮廓。实验仿真反映出该算法在检测运动车辆的处理中取得良好的效果。
关键词: 水平集方法;运动车辆检测;活动轮廓模型;像素可信度
1 引 言
自从1980年美国明尼苏达大学的第一个投入实际使用的基于视觉的车辆检测系统至今,基于视觉的运动车辆检测有了长足的发展,研究学者们提出很多的解决方法。一般的运动检测方法有背景差法、光流法、帧差法等。从早期依赖时间变化的图像帧间像素差的方法,到今天依赖时空位置、速度、特征不变量等方法,大部分都是在这三种传统算法的基础上衍生而来的。
背景差分法[9]中获取运动目标区域的效果并不在于帧图像与背景差分的本身,而取决于背景的准确建立、更新,在强光照或噪音的影响下特别是摄像头活动时背景很难获得;光流法[11]运算量很大,有学者提出的改进算法在没有特定的硬件支持下难以做到实时处理;帧差法[10]在实时性方面显示出优越性,由于是连续两帧时间间隔短,受光线变化、摄像头抖动的影响很小,但它不能完整检测出物体,受运动目标速度等影响容易形成空洞。
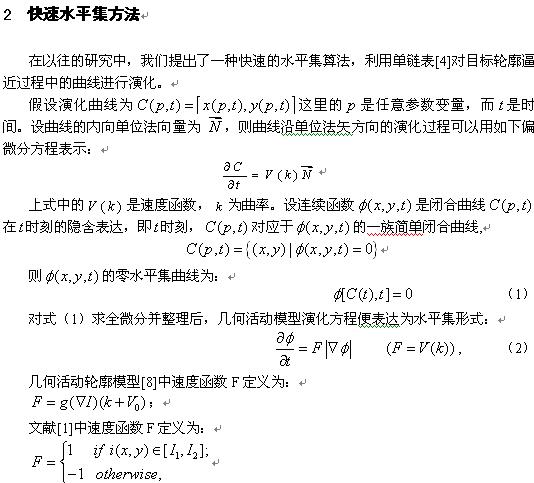
结合活动轮廓模型法具有边缘提取准确性的优势,本文提出一种基于帧差法运动信息提取的快速水平集方法来解决对运动物体的自动检测和分割,并给出目标物体的轮廓和重心的数学表示,便于后续的目标识别和行为判断等处理。本算法通过改进速度函数F的水平集方法提取目标的完整轮廓;在轮廓进化过程中利用帧差法提取的运动信息作为感兴趣区域约束曲线的进化实现运动目标的分割。



5 结 论
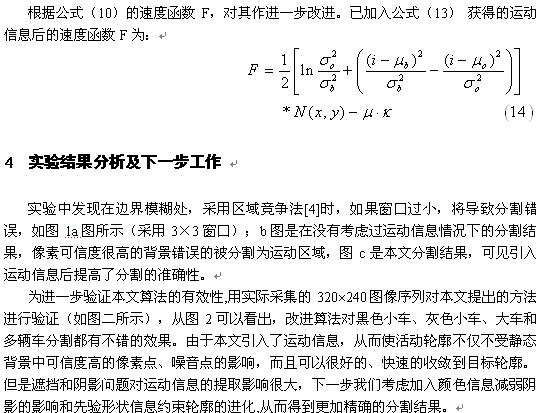
本文提出的方法分别利用目标的运动信息特征,结合水平集快速算法和图像统计势能机制,对连续两帧图像中的运动目标进行分割。实验仿真结果验证了该方法的可行性。本算法还可以直接得到目标轮廓的数学表示,以便于后续对目标行为的分析处理。
参 考 文 献
[1] Yonggang Shi,W.Clam Karl, “A Fast Implentation Of The Level Set Method Without Solving Partial Differential Equations”, Technical Report ECE-2005-02, ECE Department, Boston University Jan 2005.
[2] 王以孝,王春生. 引入光流法的活动轮廓模型[J], 电路与系统学报2003.2.78-80
[3] 施华,李翠华,韦凤梅. 基于像素可信度和空间位置的运动目标跟踪 [J], 计算机研究与发展2005. 1726 - 1732
[4] 陈超,黎宁,一种无需背景参考图的运动目标分割的水平集方法[J].江苏工业学院学报,2005,17(4):39~42
[5] 杨新.图像偏微分方程的原理与应用[A].上海交通大学出版社,2003
[6] 李玉山,杨莉等.多个运动物体的外轮廓自动提取.西安电子科技大学学报 2003.
[7] Song Chun Zhu ,A.Yuille. Region Competition : “Unifying Snakes, Region Growing , and Bayes/MDL for Multiband Image Segementation” .IEEE 1996. 884 – 900
[8]V.Caselles,F.Catte ,and F.Dibos,”A geometric model for active contours in image processing” Number. Math.,vol.66.pp. 1-31,1993
[9]C.Anderson, P.Burt, and G.Vander W.Change: “Detection and Tracking Using Pyramid transformation Techniques” , in proceeding of SPIE. intelligent Robots and Computer Vision ,volume 579,page 72-78 ,1985.
[10]I.H.Larry S,Davis,and D.Harwood, :”A Real Time System for Detecting and Tracking People” ,1998.
[11]J. barron, D. Fleet,and S. Beauchemin:”Performance of optical flow techniques". International journanl of computer vision ,12(1):42-77,1994.