- 02/16
- 2009
-
QQ扫一扫

-
Vision小助手
(CMVU)
摘要:
本文设计了一种基于Blob分析的智能机器人视觉系统。在此基础上提出识别规则物体的方法,利用不变矩、图形的面积和周长比来识别物体的形状,并采用Blob算法求取目标物的中心坐标及其任一斜边与坐标轴之间的夹角,从而识别出规定形状的物体,实现对微小或缓慢运动的目标物的定位。系统选用VCSBC4018智能摄像机来完成场景图像的采集及量化任务,并利用其自带的嵌入式操作系统及开发平台编写相应的目标识别与定位程序。实验结果表明,该系统能满足实际项目中对目标姿态信息的需要,目标识别准确率达到100%,定位相对误差小于4%。
关键词: 机器视觉系统;DSP;Blob 算法;目标识别与定位
1 引言
机器视觉主要应用于工业检测、工业探伤、精密控制、自动生产流水线、邮政自动化、粮食优选、显微医学操作,以及各种危险场合工作的机器人等 [1]。本文设计了一种基于Blob算法的智能机器人视觉系统,利用VC智能摄像机对图像进行采集和处理,利用不变矩、图形的面积和周长的比值来识别物体的形状,采用Blob算法求取目标物的位置信息,然后将此信息传递给PLC,由其控制机械手准确地抓取该目标物。
Blob算法用来从背景中分离出目标,并测量任意形状目标物的形态参数,如Blob的面积、质心、周长、尺寸、方位、数量、最小边界区等参数。与基于逐点像素处理的算法以及其他图像处理的算法相比,该算法处理速度快,实时性好。这种方法在PC机上已经有很多的应用实例,而本文中系统的硬件平台是基于智能摄像机的,具有一定的创新性和工程实用价值。
2 机械手视觉系统硬件设计
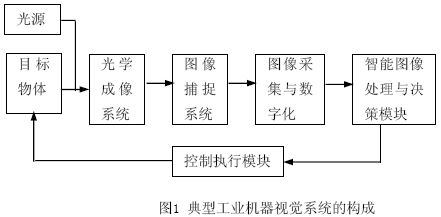
一个典型的工业机器视觉应用系统包括光源、光学系统、图像捕捉系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。[2]如图1所示。
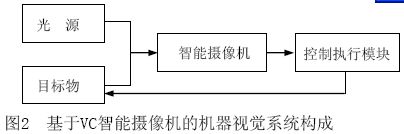
由于VC智能摄像机中包括CCD传感器[3]、A/D转换(完成图像采集与数字化功能)、TMS320C64XX DSP 芯片(相当于图像处理与决策模块),所以本系统构成如图2所示。
2.1 智能摄像机 本系统选用VCSBC4018智能摄像机。它内置CCD传感器,图像采集模块,高速处理器DSP,因而获得的图像质量高,运算速度快,是目前市场上运算速度最快的智能摄像机之一。
2.2 光源 由于实验室环境条件较好且受外界干扰小,故本系统中采用白炽灯作为光源。
2.3 图像信号处理卡 图像信号的处理是机器视觉系统的核心,本系统中智能摄像机内置的图像信号处理卡选用TI公司的TMS320C64XX DSP[4],该芯片运算速度快,工作频率高达400MHz,峰值运算能力为3200MIPS。
2.4 执行机构 系统功能的最终实现是要靠执行机构来完成的。本系统要靠执行机构去抓
取目标物,故选用自行设计的六轴机械手作为执行机构。
3 机械手视觉系统软件设计
3.1 图像特征提取
图像的几何特征在图像分析中起着十分重要的作用。在许多图像系统应用中,经常使用区域的一些几何特征,如大小、位置和方向等来确定物体的位置并识别它们。二值图像能给出物体的轮廓信息,因此适合于图像几何特征的提取。
当图像为二值图像时,可用矩来描述图像中一些区域的形状特征。区域R (i,j)阶矩可由式(1)求得

由于用式(1)描述区域的形状对区域的平移、旋转、尺度变换不具有不变特性,因此需要对该矩进行变换处理,即先将坐标点移到区域的形心,再重新计算区域的中心矩,计算方法如式(4)
中心矩ij μ 虽然对区域平移具有不变性,但对旋转和尺度变化依然敏感,可通过对ij μ 进行归一化得到尺度的不变性。归一化中心矩定义为式(7)
 (7)
(7)
由式(7)可求出一组归一化的中心矩,同样,将中心矩归一化进行组合,可获得如式(8)~(13)所示的6 个不变的矩组合

当区域进行平移、旋转、尺度变换时,这些不变矩是不变的。不变矩具备了良好的形状特征。
3.2 物体图像的识别
模式识别是指对一系列过程或事件的分类与描述。 对于从一幅含有多个物体的数字图像中识别某一事物的过程,一般需要3 个阶段:图像分割或分离;特征提取;分类或决策[5 ] 。
被采集的图像先进行二值化处理,再用Blob 算法将目标和背景进行分离,同时进行特征提取,包括图形的不变矩、面积和周长,最后进行分类识别。
本文涉及的物体图像均为规则几何图形,此图形的边缘轮廓几乎包含了该物体几何形状的所有信息。在规则图形中周长与面积有固定的比例关系。采用比例公式 (其中P为周长, S 为图形面积),并结合不变矩的图形识别算法,可判断出指定物体的形状。[6 ]
(其中P为周长, S 为图形面积),并结合不变矩的图形识别算法,可判断出指定物体的形状。[6 ]
3.3 目标物定位
求取目标物位置的方法很多,如参考文献[7][8][9]中所述。本文采用Blob算法。该算法首先将对象从背景中分离,得到二值化的图像,将连通区域里的像素分组组成对应的Blob(斑点),然后根据Blob的几何学属性如面积、大小、方向等,对感兴趣的对象进行定位、识别和检测[10]。
3.3.1 求取目标物中心的世界坐标(centerX ,centerY)
用Blob 算法得到的中心坐标(x,y)仅仅是图像上的坐标,要得到它的世界坐标
(centerX ,centerY),必须结合摄像机的标定工作。具体换算公式如式
centerX=x*radio
centerY=y*radio (14)
radio—经过标定后,每个像素在世界坐标系中的实际长度。
3.3.2 求取目标物某一斜边与坐标轴的夹角θ
找到目标物中心后,从中心往左边搜索,找到目标物左边缘上的三个点,再通过比较这三个点的坐标,找到合适的两点(x1 , y1),(x2 , y2),以求取该斜边的斜率k。计算公式如式

4 系统实验
硬件系统安装调试好后,将自己编写的图像处理软件下装到VC智能摄像机的DSP芯片中,然后将不同形状的物体放入智能摄像机的视野中,运行程序,即可得到图3所示的识别结果,这是一组由本系统处理后,在PC机上显示出的图像识别及定位结果。

图(a)中目标物的中心坐标centerX=31.2cm ,centerY=6.6cm。夹角θ =90 度。实际测量得centerX=31.5cm ,centerY=6.8cm;夹角θ =90 度。最大相对误差为3.03%。
图(b)中目标物的中心坐标centerX=21.6cm ,centerY=21.2cm;夹角θ =39 度。实际测量得centerX=21.6cm ,centerY=21cm;夹角θ =40 度。最大相对误差为2.6%。
5 结论
本系统用VCSBC4018智能摄像机实现物体的图像采集及识别、定位,系统集成度高,图像处理质量好。实验表明视觉系统的识别及定位算法先进实用,能满足实际项目中对目标姿态信息的需要。该系统对目标的识别准确率达到100%,定位的相对误差小于4%。
本文作者创新点:采用智能摄像机对图像进行采集和处理,增加了系统的实时性,节省了硬件开支;图像处理软件完全由自己开发,大大节省了购买费用。
参考文献:
[1] David A. Forsyth, Jean Ponce. Computer Vision[M]. Prentice Hall,Inc.,2003
[2] 李锋.机器视觉应用技术研究[D].浙江大学.2003.2.1
[3] 王庆有.CCD应用技术[M].天津大学出版社,2000
[4] TMS320C6000 Programmer’s Guide [G/OL]. Texas Instrument,2006:1-56
[5] 边肇琪.模式识别[M].北京:清华大学出版社.2000
[6] 陈正慧,李捍东,彭小芳,孙兴.基于DSP 机器视觉的矩形类物体识别研究[J].微计
算机信息,2008,8-2:192-194
[7] 胡震,袁小海,陈荣盛,刘培林. 用于目标检测和精确定位的水下机器人视觉系统[J].
中国造船.2000,2:89-94
[8] 刘禾.数字图像处理及应用[M].北京:中国电力出版社.2006.
[9] 陈书海,傅录祥.实用数字图像处理[M].科学出版社,2005
[10] 陈丽娜.对象实时检测和精确定位应用研究[D].华南农业大学.2003.5.1
- 上一条:机器视觉在注射器检测中的应用
- 下一条:基于机器视觉的无夹具加工数控系统研究