- 11/08
- 2022
-
QQ扫一扫

-
Vision小助手
(CMVU)
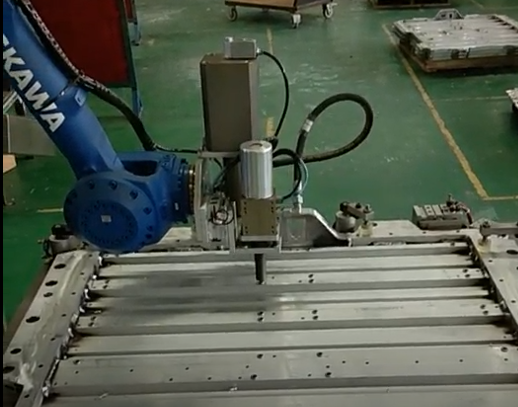
自动拉铆设备用于各类金属板材、管材等制造工业的紧固铆接,目前广泛地使用在汽车、航空、铁道、制冷、电梯、开关、仪器、家具、装饰等机电和轻工产品的铆接上。为解决金属薄板、薄管焊接螺母易熔,攻内螺纹易滑牙等缺点而开发,它可铆接不需要攻内螺纹,不需要焊接螺母的拉铆产品、铆接牢固效率高、使用方便。在自动拉铆设备中,视觉系统主要完成引导铆接系统对铆接孔精确定位、纠偏实现自动拉铆、压铆的功能。

01
引导方式
Mark点定位引导
实现方式:选取产品上对角两个铆接孔做为两个Mark点,视觉系统通过对Mark点进行拍照定位计算出其他所有铆接的位置完成铆接;
优点:拍照次数少,节省CT时间;
缺点:标定步骤繁琐,铆接孔相对位置一致性差时不适用,运动平台绝对精度、XY轴平行度垂直度有一定要求。
铆接孔定位引导
实现方式:对产品上的每个铆接孔拍照定位计算位置偏差完成铆接;
优点:标定步骤简单,铆接孔相对位置一致性无要求,运动平台绝对精度、XY轴平行度垂直度要求低;
缺点:拍照次数多,CT时间长,铆接孔形状特征一致性有要求。
02
标定步骤
铆接孔相对位置导入:产品图纸导入或用铆枪直接示教每一个铆接孔确定(铆接孔定位引导模式不需要);
相机标定:完成九点标定获取相机图像坐标系与XY运动模组坐标系映射关系;
铆枪中心标定:用铆枪示教9点标定时的固定特征点在运动模组中的绝对坐标。

03
Mark点定位
相机标定:
1.使用九点标定法获取图像坐标系与运动坐标系变换关系;
2.使用铆枪指点法示教铆枪中心点与视野中心点在运动坐标系下的相对坐标。
图纸标定:
1.选取2个Mark点并已知其图纸坐标、再使用铆枪示教获取运动坐标系坐标后可计算出图纸上所有铆接点对应的运动坐标系坐标。
Mark点定位:
1.相机拍照定位获得当前产品Mark点像素坐标;
2.使用相机标定结果计算Mark点运动坐标系坐标;
3.使用图纸标定结果计算当前所有铆接孔运动坐标系坐标。
04
铆接孔定位
相机标定:
1.使用九点标定法获取图像坐标系与运动坐标系变换关系铆接孔定位;
2.使用铆枪指点法示教铆枪中心点与视野中心点在运动坐标系下的相对坐标。
铆接孔定位:
1.相机拍照定位获得当前产品铆接孔像素坐标;
2.使用相机标定结果计算铆接孔运动坐标系坐标。
04
工作流程

06
产品配置
相机:500W像素
镜头:35mm定焦镜头
光源:条光、高角度环光、环形无影光
视野:50mm*37.5mm
像素精度:0.02mm/pixe

华周专注于机器视觉算法及硬件产品的研发和国产化,拥有15年机器视觉产品应用和研发经验,公司拥有强大的技术、研发及销售团队,涵盖电子、汽车、医疗、食品、航空航天、物流、铁路、港口自动化等行业;自主产品包括工业相机、镜头、光源、智能相机、读码器、视觉算法库、系统集成,力图实现机器视觉行业硬件、软件、核心算法、解决方案全产业链布局。
公司被评为“高新技术企业”并获得2项发明专利、100多项实用新型专利、100多项计算机软件著作权。
公司愿景:专注机器视觉,助力华夏智造!
扫码关注我们

电话:0755-26452586
官网:www.hztest.com.cn