首页>论文
- 类别:
-
全部 专家综述 技术前沿 专业论文
展开
- 标签:
-
全部 机器视觉 图像处理 机器人 人工智能 模式识别 其他
展开
-
-
-
基于棱镜技术的线扫描相机实现RGB和SWIR同时成像
专家综述 2025-07-30 | 机器视觉 | 图像处理 |1234 -
基于光流预测的三维光场显示透视关系校正
技术前沿 2025-07-29 | 机器视觉 | 图像处理 | 模式识别 |1266 -
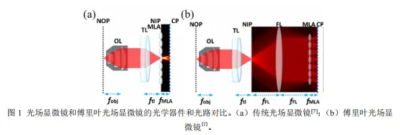
傅里叶光场显微镜的进展及其生物应用
技术前沿 2025-07-24 | 机器视觉 |1549 -
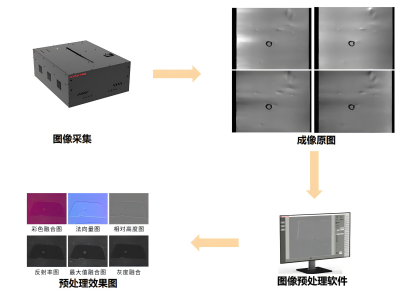
光度立体成像技术实现高效精准2.5D缺陷检测
专家综述 2025-07-23 | 机器视觉 | 图像处理 | 人工智能 |1532